Unidad Pedagógica el Roble

Ubicación Geográfica.
Políticamente es el distrito V del Cantón IV de
Santa Bárbara de Heredia. Abarca los poblados de El Roble, Chahuites y
Los Cartagos.
MISIÓN
Ofrecer a los alumnos y alumnas
del centro educativo el roble, la adquisición de competencias necesarias para
desarrollarse en la ética estética y ciudadanía, de manera que disfrute,
aprecie comprenda y se exprese en una sociedad de permanente cambio,
en busca de una mejor calidad de vida.
VISIÓN
Formar seres humanos íntegros que
promuevan valores firmes, conocimientos significativos y permanentes que
desarrollen la capacidad productiva e intelectual en un ambiente de cambios y
desafíos, mediante el desarrollo de una educación de calidad en un mundo
globalizado.
Experiencias 2016
Talleres de Introducción a la Robótica
II Ciclo
Objetivo general del taller
Conocer los conceptos teóricos, mecánicos y de
programación que sustentan la robótica, así como la forma en que se constituye
un robot.
Imágenes del Trabajo Realizado
A continuación podemos observar
algunos de los robots realizados en los talleres impartidos a estudiantes
II ciclo.
II ciclo.
Las primeras dos imágenes son de robots realizados por estudiantes de sexto grado.


En la siguiente imagen podremos observar el Robot
nombrado Super Perro, que utiliza el mecanismo 7 Perilla Polea, realizado por
una pareja de estudiantes de cuarto grado

I ciclo
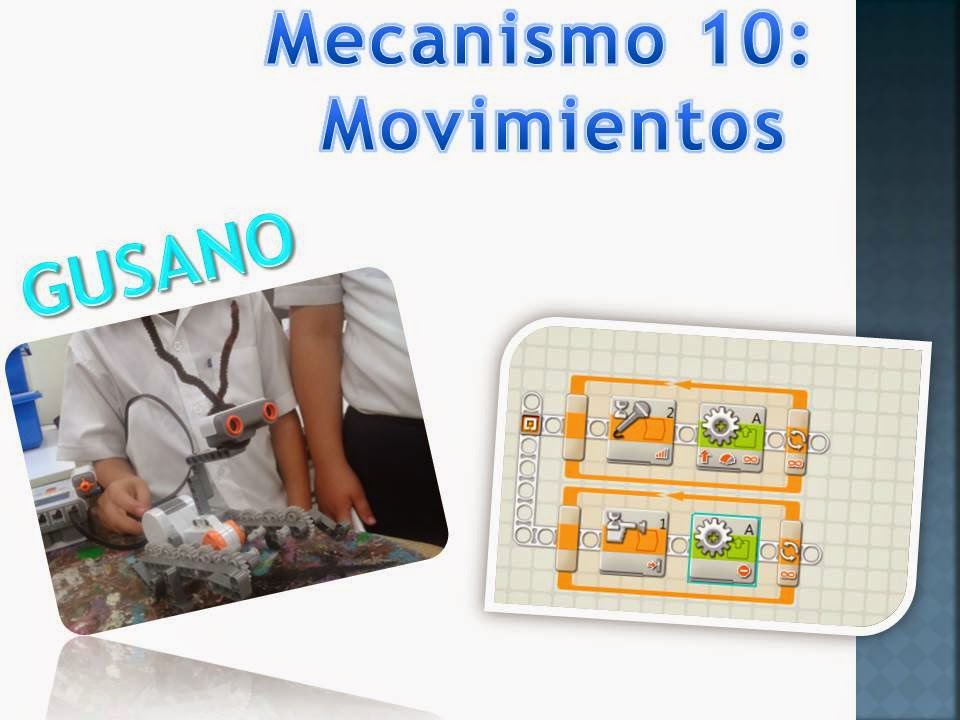
En la siguiente imagen podremos observar el Robot nombrado Gusano, que simula el movimiento de un gusano, fue realizado por estudiantes de tercer grado. La programación consiste en que el gusano al escuchar un sonido mayor a 80 empieza a avanzar de forma ilimitada, y al presionar el botón de contacto se detiene.
En el siguiente podremos observar el Robot nombrado Aviones voladores, que simula un juego mecánico, fue realizado por estudiantes de tercer grado.
La programación consiste en que el robot al escuchar un sonido mayor a 85 empieza reproduciendo un sonido de Inicio del juego,luego avanza con potencia de 15 durante 2 rotaciones, luego aumenta la potencia a 40 durante 3 rotaciones y por último la aumenta a 80 durante 3 rotaciones, finalmente reproduce otro sonido que indica que finalizo el juego.
También, se programo el botón de contacto para que en caso de emergencia se pueda detener el juego al presionar dicho sensor.

Club
2014
Este club fue impartido desde finales de
setiembre hasta noviembre.
Lo conformaron 16 estudiantes de quinto y sexto grado.
Tema del Proyecto
Maquinaria para facilitar el transporte y
descarga del café
Descripción del Proyecto
La comunidad del Roble se encuentra en
una zona cafetalera, por lo que los estudiantes decidieron diseñar algunos
robots que ayuden a los caficultores a transportar y almacenar el café que se
cultiva en la zona.
Se realizaron 3 diferentes tipos de
robots los cuales describiremos a continuación:
1. La garra: Que permitirá mover los
sacos individualmente de un lugar a otro
Mecanismos Utilizados: Engranajes, para
abrir y cerrar las garras
Sensores utilizados: dos sensores de
tacto, uno para que habrá las garras y otro para que las cierre.

2. El montacarga: Permitirá subir y bajar los sacos de
café del lugar donde se almacenara.
Mecanismo Utilizado: Polea, que permitirá subir y bajar la carga.
Sensores utilizados: Cuenta
con un sensor ultrasonido que permitirá detectar cuando se encuentra cerca del lugar donde debe subir los sacos de café.


3. Tractor con carreta: Permite movilizar
gran cantidad de
sacos de café de la finca cafetalera hasta el recibidor de café.
Mecanismos Utilizados: Engranajes, que le dan potencia para transporta la
carga.
Sensores Utilizados: Cuenta con un
sensor ultrasonido programado para que el tractor se detenga cuando detecte un obstáculo cerca.


Para concluir el club se realiza una exposición de los trabajos realizados a los otros estudiantes de la escuela



2015
Durante este año se realizan los talleres para I y II ciclo
A continuación describiré uno de los productos realizados durante los talleres.
Nivel: I grado
Temática del Taller: Semejanzas de un robot con los seres vivos.
Realizado por : Jareth Villegas Araya y Fabricio Leal Alfaro.
El robot consiste en un dinosaurio que mueve su cabeza y sus patas delanteras, utilizando el mecanismo Polea correa.



Video
Encargada del Proyecto

Ana Patricia
Sánchez Ramírez
Docente
Informática Educativa
No hay comentarios.:
Publicar un comentario